TMS定位,定不准?易脱靶?难重复定位?

在TMS临床和科研应用中,你是否碰到过这些疑问:
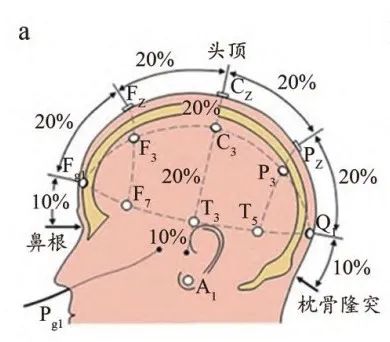
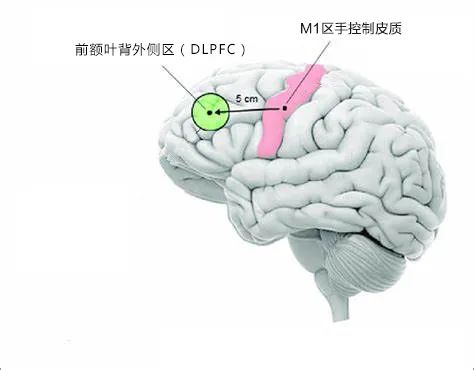
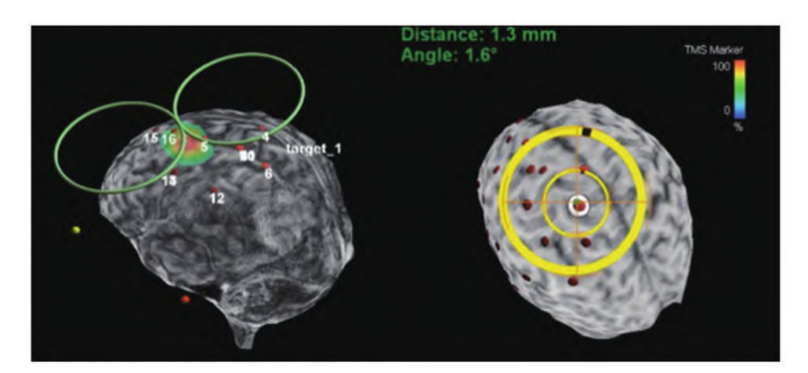
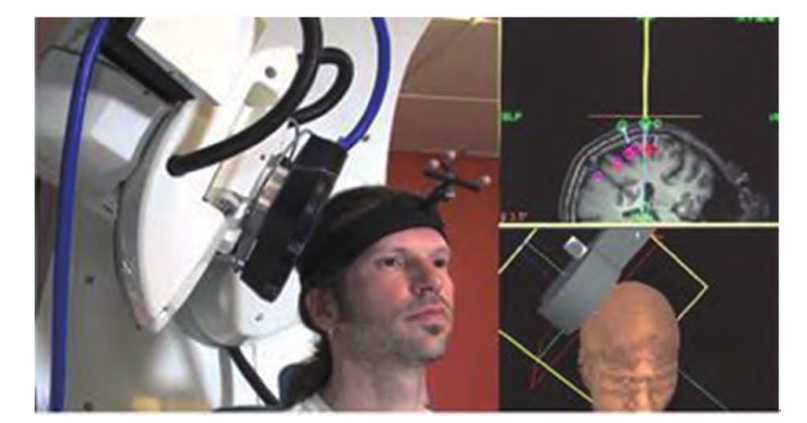
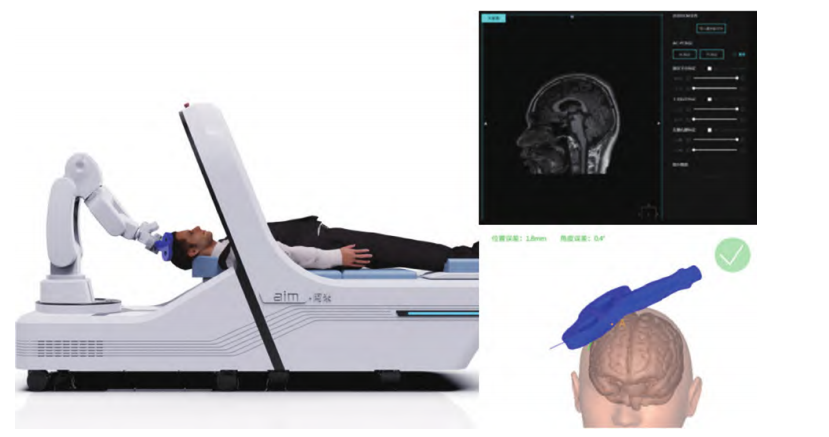
之所以这么关注TMS定位的精准,是因为根据研究显示:定位误差超过5mm,就有可能是无效TMS。在TMS定位技术的发展过程中,随着科技的进步,一直在不断摸索,下面一起来了解TMS定位技术吧,看哪种最适合你!1985年,Barker教授手持刺激线圈,在没有定位辅助工具的情况下进行了TMS,确定原始运动皮质(M1区)手控制区为靶点的定位方法可能就是脑功能区定位法。适用于对功能明确、易于检测到靶区刺激效果的皮质进行定位,如刺激M1区,这种方法容易个体化,简单易行。对刺激效应不明显的脑区不适用(如对主要负责情绪、记忆功能的前额叶);还有,此法需要手持刺激线圈或用固定支架固定刺激线圈,无法准确感知每次刺激线圈与头皮的贴合度和角度,因此无法实现后续治疗与前一次治疗的精准重复,也无法解决治疗中靶点偏移的问题。TMS研究中利用参照国际脑电10-20系统的解剖学定位法,根据大脑的常模确定大概的解剖结构及位置,此法依赖操作者对大脑解剖知识的熟练掌握,是一种非个体化的定位方法。该法简单易学易用,国内各大经颅磁刺激仪的生产厂商,也多研发并注册了依照国际脑电10-20系统的TMS定位帽,供临床使用。该方法也受操作者对解剖知识的了解度和定位帽佩戴正确与否的影响,而且个体的头部大小存在10%-20%的差异。同样需要手持,无法实现精准重复,也无法解决靶点偏移问题。DLPFC是精神科治疗许多疾病的常选刺激部位,1996年,Pascual-Leone等在TMS研究中应用了“5cm法则”,通过M1区向前移动5cm来确定DLPFC。临床上多用脑功能区定位法确定M1区手控制皮质,然后通过向前平移5cm来定位DLPFC。由于每个人头颅大小不同,没有考虑每个人解剖和功能变异的因素,精准度不高,是一种非个体化定位方法。为了解决TMS治疗过程中易脱靶的难题,有设备商在已有固定支架的基础上研发出随动支架。随动支架同固定支架一样,通过三轴一体化的机械臂,可实现180°全方位定位,另外在支架底座进行了滑轨设计,当刺激线圈固定在头部后,被刺激者的头、头枕、刺激线圈、支架相对保持固定,一旦头部发生左右偏移,头枕、刺激线圈、支架可随头部移动。确保头动过程中,头、刺激线圈、支架始终联动,实现跟随不脱靶。首次定位仍依赖前面的定位方法,精准度不够;随动支架更多考虑患者头部水平的移动,不能实现头部多轴向的随动;由于敏感性不够,该法只能解决治疗过程中粗略的靶点跟随。导航经颅磁刺激(navigated Transcranial Magnetic Stimulation,nTMS),可以导入个体的MRI数据,重建3D头模,再采用红外光学摄像头和导光追踪装置,通过人工操作将现实脑和3D头模进行匹配,将现实脑的空间位置转换到“可视化”的3D头模软件上。这样就实现了TMS首次精准定位的需求,并且对刺激线圈与头皮的距离和角度有了严格控制,定位准确性得以大幅提升。可以实现首次精准和二次精准重复定位,受到科研工作者的支持。全程精准全依赖操作者的手法,操作繁琐、耗时、费力、低效,而且对操作者专业度要求高,不适用于临床应用。随着人工智能技术的发展,智能机械臂(或称机器人)逐渐被引入TMS定位领域,机器人直接将磁刺激线圈自动推送到患者的头部靶点,并让刺激线圈与颅骨保持相切的状态。通过指令控制,机械臂会快速、精细地执行命令,可提供精准、智能的TMS定位,这种技术被称为机器人TMS。这是在光学导航技术路线上,增加智能机械臂,用机械臂代替人工握持刺激线圈,实现精准重复和智能跟随。通过用机械臂代替人工完成一些工作,可以监测治疗过程中靶点偏移情况并实时跟随矫正,确保治疗中不脱靶。3D头模与现实脑的配准过程仍需操作者手动,容易引入操作误差,影响精准和工作效率,而且患者需要全程佩戴靶标,舒适度低,使其在临床中的使用仍受限。这种技术路线的代表产品是阿米磁刺激机器人系统。阿米机器人充分整合个体的头面部信息、大脑头皮外形、被试个体化的MRI数据等三方面的定量信息,并结合刺激靶点与刺激线圈表面中心锁定的距离和角度,实现智能确定靶点。该款机器人的智能化程度、工作效率和便捷性较第一种机器人有明显提高,患者无佩戴任何靶标,只需通过机器人的视觉扫描摄像头监测,即可实现实时跟踪和靶点锁定跟随。为精准化、智能化TMS的实现提供了可行性;为科研成果的可信度和科学性提供了保障;为临床应用实现精准、智能TMS创造了硬性条件。无需操作者手动探索确定靶点,靶点一键即达,降低对操作者专业性的要求和探索靶点时的操作误差,明显提升了定位精度和可重复性,而且操作员更省心,患者舒适度更高。
TMS定位技术的发展为TMS技术的临床应用带来了便利,提高了工作效率,使得TMS技术的应用更加规范化和科学化。但目前这些定位均只是在解剖学层面上实现精准,而大脑皮质出现损伤后会出现各种功能代偿和失代偿,神经网络功能也会发生变化,除了解剖学定位精准外,未来能否联合功能性脑检测技术,在功能层面实现更加精准化、个体化的TMS,是值得思考的方向。此外,随着人工智能技术发展,数据网络化、大数据的利用,TMS技术的应用也将朝着个性化、智慧化方向发展。参考文献:
尧利书,孙聪,葛康,蔡胜安.经颅磁刺激定位技术的研究进展[J].中国医疗设备,2022,37(2):159-163171.
后台回复“036”获取文献原文

{"weixin":{"label":"微信","name":"weixin","selected":true,"value":true,"sortid":"1","shareid":"weixin","sharetitle":"分享到微信","event":"shareToWeiXin","lang":"shareWeb_WeiXin"},"copy":{"label":"复制网址","name":"copy","selected":true,"value":true,"sortid":"2","shareid":"copy","sharetitle":"复制网址","event":"copy_url","lang":"shareWeb_Copy"},"qq":{"label":"QQ好友","name":"qq","selected":true,"value":false,"sortid":"1","shareid":"qq","sharetitle":"分享到QQ","event":"shareToQQ","lang":"shareWeb_QQ"},"sina_weibo":{"label":"新浪微博","name":"sina_weibo","selected":true,"value":true,"sortid":"4","shareid":"sina_weibo","sharetitle":"分享到新浪微博","event":"shareToSinaWB","lang":"shareWeb_SinaWeiBo"},"qq_zone":{"label":"QQ空间","name":"qq_zone","selected":true,"value":true,"sortid":"5","shareid":"qq_zone","sharetitle":"分享到QQ空间","event":"shareToQzone","lang":"shareWeb_QQZone"},"renren":{"label":"人人网","name":"renren","selected":true,"value":true,"sortid":"7","shareid":"renren","sharetitle":"分享到人人网","event":"shareToRenren","lang":"shareWeb_RenRen"},"douban":{"label":"豆瓣网","name":"douban","selected":true,"value":true,"sortid":"8","shareid":"douban","sharetitle":"分享到豆瓣网","event":"shareToDouban","lang":"shareWeb_DouBan"},"baidu_tieba":{"label":"百度贴吧","name":"baidu_tieba","selected":true,"value":true,"sortid":"10","shareid":"baidu_tieba","sharetitle":"分享到百度贴吧","event":"shareToTieba","lang":"shareWeb_TieBa"},"Facebook":{"label":"Facebook","name":"Facebook","selected":true,"value":true,"sortid":"11","shareid":"Facebook","sharetitle":"分享到FaceBook","event":"shareToFacebook","lang":"shareWeb_Facebook"},"Twitter":{"label":"Twitter","name":"Twitter","selected":true,"value":true,"sortid":"12","shareid":"Twitter","sharetitle":"分享到Twitter","event":"shareToTwitter","lang":"shareWeb_Twitter"},"LinkedIn":{"label":"LinkedIn","name":"LinkedIn","selected":true,"value":true,"sortid":"13","shareid":"LinkedIn","sharetitle":"分享到linkedIn","event":"shareToLinkedin","lang":"shareWeb_Linkedin"},"whatsapp":{"label":"whatsapp","name":"whatsapp","selected":true,"value":true,"sortid":"15","shareid":"whatsapp","sharetitle":"分享到whatsapp","event":"shareToWhatsapp","lang":"shareWeb_whatsapp"},"line":{"label":"line","name":"line","selected":true,"value":true,"sortid":"15","shareid":"line","sharetitle":"分享到line","event":"shareToLine","lang":"shareWeb_line"},"qq_weibo":{"label":"腾讯微博","name":"qq_weibo","selected":true,"value":true,"sortid":"3","shareid":"qq_weibo","sharetitle":"分享到腾讯微博","event":"shareToQQwb","lang":"shareWeb_QQWeiBo"}}